Matrix3D — модель, предлагающая решение сразу нескольких задач в рамках единой архитектуры: оценку положения камер, предсказание глубины и генерацию новых ракурсов.
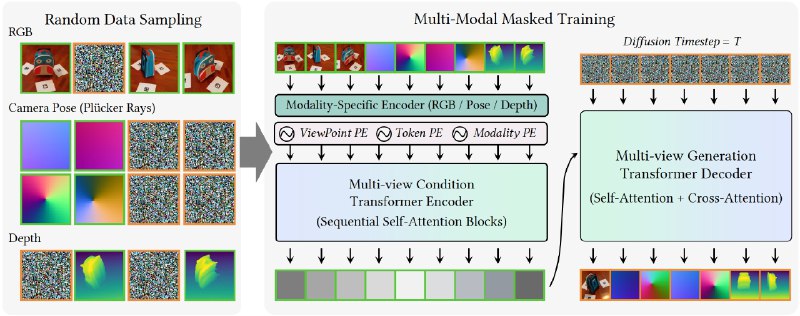
Всю эту красоту обеспечивает модифицированный диффузионный трансформер, который обрабатывает изображения, параметры камер и карты глубины как взаимосвязанные модальности. Он не только упрощает традиционный пайплайн (нет зависимостей от отдельных алгоритмов SfM или MVS), но и повышает точность за счет уникальной оптимизации.
Ключевая особенность Matrix3D — маскированное обучение, позаимствованное из методов MAE. Модель тренируется на частично заполненных данных: парах «изображение-поза» или «изображение-глубина». При этом модель учится «достраивать» недостающие модальности, что позволяет комбинировать входы и выходы во время инференса. Например, можно добавить карту глубины с физического датчика или сгенерировать новые ракурсы на основе всего двух изображений.
Результаты тестов с задачей оценки поз на датасете CO3D Matrix3D обходят специализированные методы (RayDiffusion): точность определения положения камеры достигает 96,3% против 92,4% у конкурентов.
В синтезе видов модель демонстрирует PSNR 20,45 против 19,22 у SyncDreamer, а в оценке глубины — AbsRel 0,036 против 0,064 у Metric3D. При этом Matrix3D не требует отдельных моделей для каждой задачи, все решается в рамках одной модели.
Практическая ценность модели — в ее адаптивности. Например, для 3D-реконструкции из одного кадра Matrix3D сначала генерирует недостающие ракурсы, оценивает их позы и глубину, а затем оптимизирует сцену через 3D Gaussian Splatting.
Для работы с несколькими кадрами без известных поз модель сама восстанавливает параметры камер, что раньше требовало отдельного этапа с COLMAP. Все это реализовано в репозитории с готовыми скриптами — от синтеза видов до полной реконструкции.
Конечно, есть нюансы: качество облаков точек пока уступает другим методам (GeoMVSNet). Но даже имеющиеся результаты достаточны для инициализации 3DGS, а главное — весь процесс занимает несколько минут на одной RTX 3090. Для сравнения: CAT3D, хотя и точнее в синтезе, требует 16х A100 и оптимизации под каждую сцену.
@ai_machinelearning_big_data
#AI #ML #Photogrammetry #Matrix3D #Apple
Create: Update:

>>Click here to continue<<
Data Science by ODS.ai 🦜
Share with your best friend
VIEW MORE